はじめに
ステッピングモーターは、駆動パルスに従い、決まった角度で軸が回転するため、フィードバック制御を必要とせず正確な回転動作ができることから、計測器などの自動X-Yステージや、クレーンゲーム機のハンド駆動など幅広く使用されています。実験(その1)では、ステッピングモーターの回転する仕組みをご紹介します。また、本稿の補足を別に用意しました。当HPのカテゴリーから本記事を選択し、「ステッピングモーター(補足)」を参照して下さい。
構造
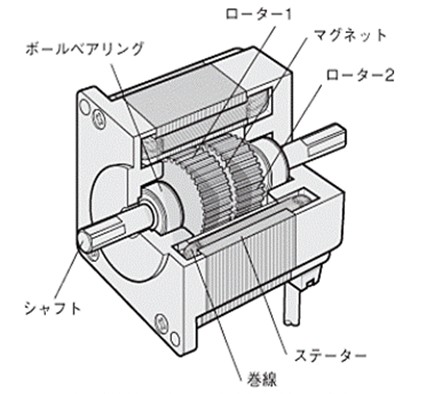
下は、ステッピングモーターの構造図です。ステーター(固定子)とローター(回転子)から構成されます。ローターは、マグネットによって軸方向に磁化されていて、ローター1がN極ならローター2はS極です。
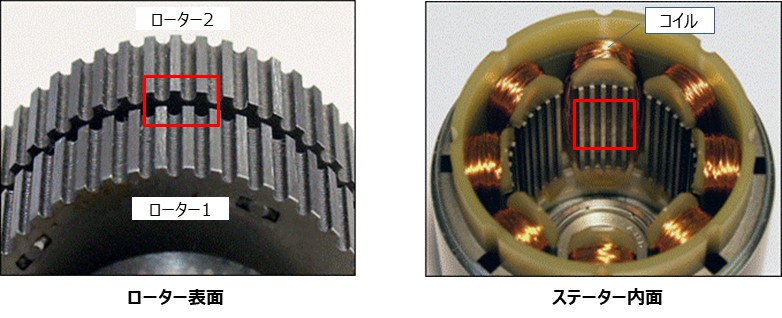
下は、ローターおよびステーターの拡大写真です。歯車のような歯が刻まれています。また、ローター1と2は1歯分ずれています。ステーターにはコイルが巻かれており、電磁石になっています。
下図は、ローターとステーターの相対位置を表したものです。ローター1(赤)をN極、ローター2(青)をS極とします。ローターとステーターの間には狭い隙間があります。
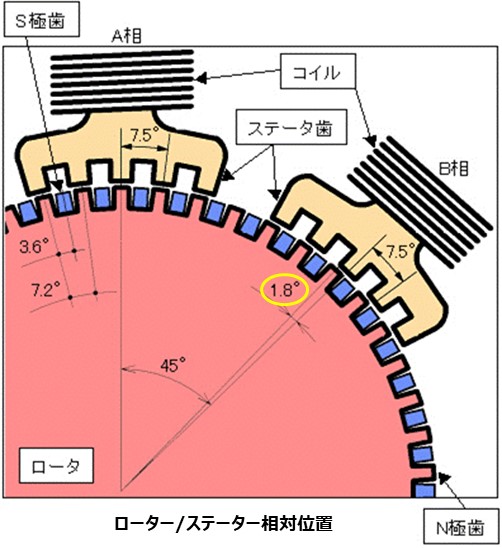
ローター1と2には、それぞれ50個の歯があり、ローター歯のピッチ角は7.2°です。一方、ステーター歯のピッチ角は7.5°です。ステータ歯とロータ歯のピッチ角は0.3°違うため、A相とB相の中心角が45°の場合、A相歯とローター歯が正面位置のとき、B相歯とローター歯には1.8°の差が生じます。この僅かな差が回転の肝になります。
種類
ステッピングモーターは、ステーターの相数とコイル巻線で型が分けられます。相数とは、電気的に磁力を発生させる機構の数をいい、相数が大きい方が細かく回転します。5相と2相が主流です。コイル巻線は、バイポーラ型(ユニファイラ巻線)と、ユニポーラ型(バイファイラ巻線)があります。コイル巻線によって、モーターのトルク特性は異なります。ここでは、2相バイポーラ型で説明していきます。
回転の仕組み
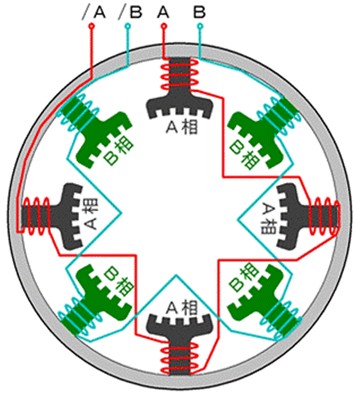
下は、2相バイポーラ型のステーターの模式図です。ステーターには、A相とB相の2つの相が45°毎に交互に配置され、各相は1本のコイルでつながっています。コイルに電流を流すと相は電磁化します。これを励磁といいます。/AはAの逆相を意味します。電流の流れがA → /Aの励磁に対し、/A → Aの励磁は逆相です。
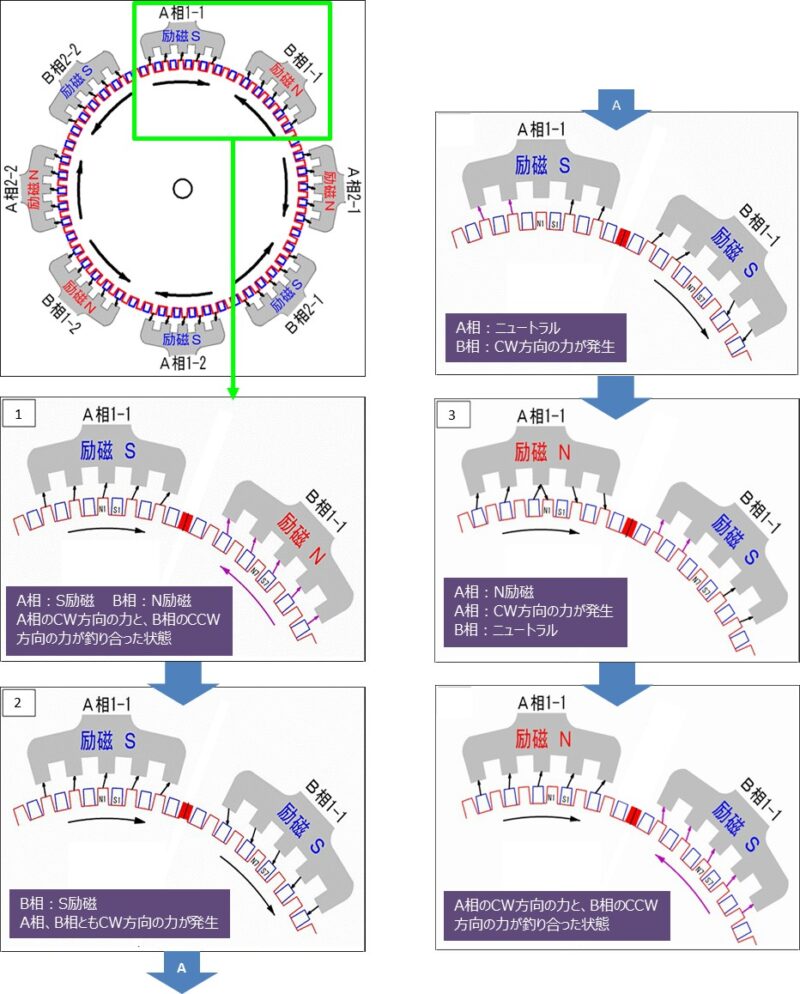
相励磁とローターの動きを順を追って見ていきます。下図は、A相,B相の励磁が切り替わる間のローターが動く様子です。相励磁によって、ローターとステーター間に磁気力が生じ、ローターに回転力が加わります。
なお、ステッピングモーターの回転角と回転速度は次式で表されます。基本ステップ角とは、1パルス入力される毎に回転する角度のことで、一般的な2相モーターの基本ステップ角は1.8°です。
回転角[°] = 基本ステップ角[°] × パルス数
回転速度[rpm] = 基本ステップ角[°] / 360 x パルス速度[Hz] x 60[s]
励磁方式
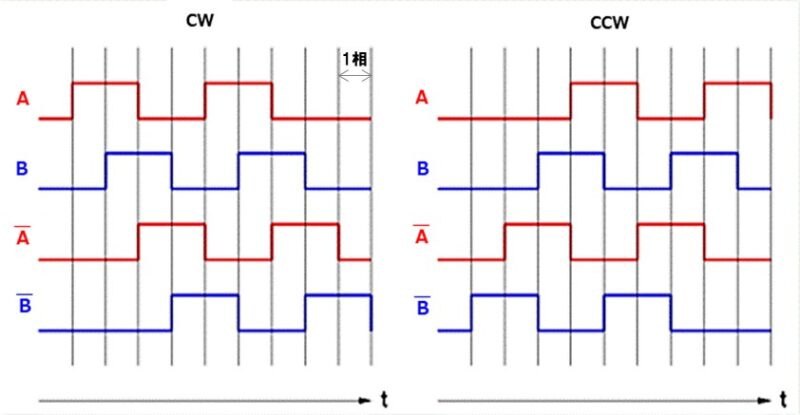
各相のコイルにどのように電流を流してモーターを回転させるかが励磁方式であり、1相励磁、2相励磁、1-2相励磁などがあります。2相励磁は、下図タイムチャートのように、A,B各相の電流方向を2相毎に切り替え、1相分をオーバーラップさせながら励磁する方式です。1相励磁よりも出力トルクが大きくダンピング性に優れ、滑らかに回転します。
回転方向は、相を励磁する順番で決まります。CW(時計回り)は A → B → /A → /B、CCW(反時計回り)は /B → /A → B → A(CWと逆)の順に励磁します。
駆動方法
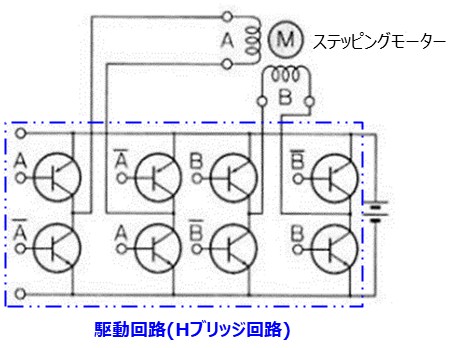
ステッピングモーターの駆動は、下図に示すHブリッジ回路で励磁方式に従ったパルス電流をA相,B相に印加します。トランジスタ(もしくはFET)は、電流方向を切り替えるスイッチの役割をします。
まとめ
ステッピングモーターの構造はシンプルですが、精密且つ巧みな仕組みによって精度の高いステッピング回転を可能にしています。実験(その2)では、実際にステッピングモーターを動かしてみます。
– 以上 –